This section explains the actions that can be taken on robots that are in various statuses and how to check their statuses.
Robot Monitoring
Program-wise robot monitoring can be executed using this sub-menu. Robot monitoring is possible for UAT and Live environments. One can take action on Check, Running, and idle robots. Not responding can be moved to Idle for further action.
Figure 1
Robot Managementà Robot Monitoringà Robot Monitoring
Select the Environment and click on the Go button.
One can find the Program, Project and the Robot Name along with the number of robots in the various statuses as Idle, Running, Checked and not responding.
Click on the number box to view pertaining details. Let us consider the following example. Idle robot is selected and made to run.
Idle

Figure 2
Select the Project and the Program and select the Robot Name and click on the Run button.

Figure 3
Success message will be displayed.
Figure 4
One can see that the robot has moved from idle to running.
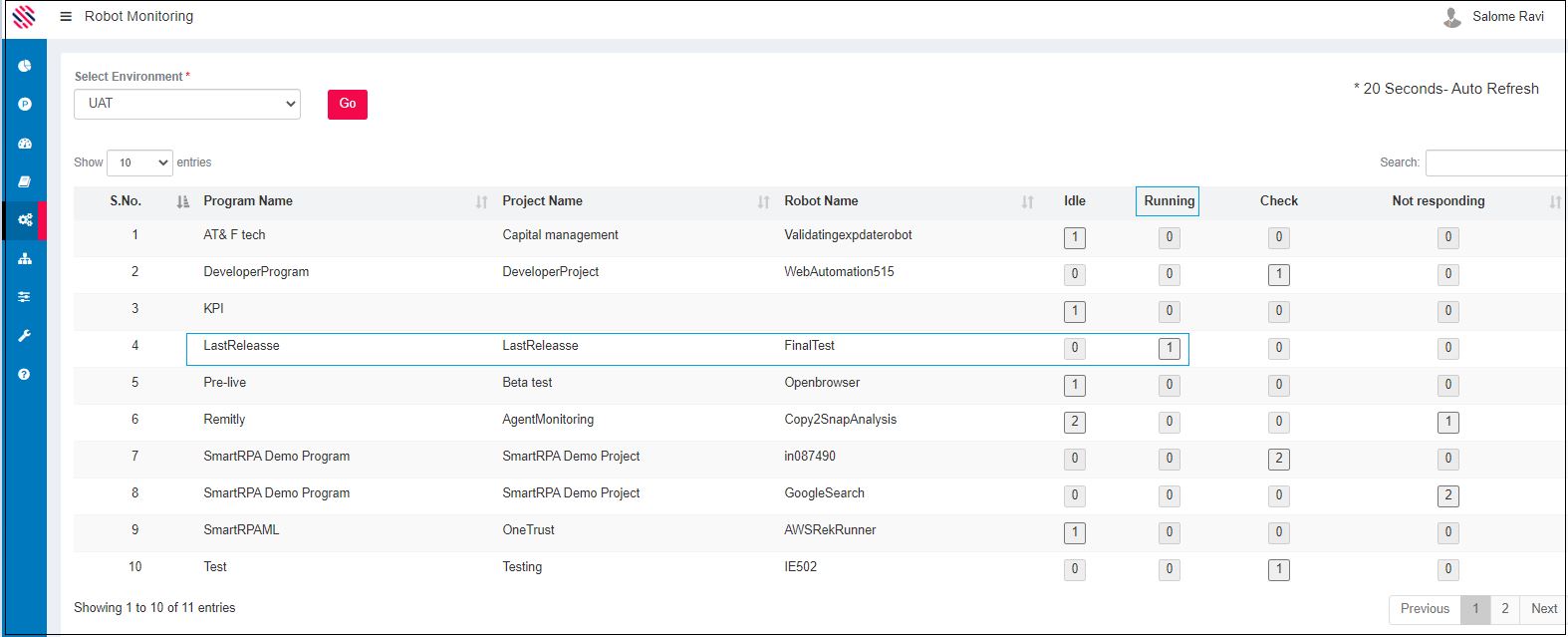
Figure 5
Check
Due to some reason if the robot is not continuing, and requires manual interception, it will be moved to the To Check state. Action can be taken on the Check Robots. View option under the View Log header will provide the log level details. Based on which, appropriate action can be taken on the to check robots. For instance, a workflow is already running, but delay occurs due to some reason, this will be considered as Already Running. Therefore this can be moved to already running state.
Robots are checked and can be made to Run, Moved to Idle or can be moved to Already Running.
If one selects Check robots, the pertaining information will be displayed accordingly. Select the robot and click on the options, such as Run, or move it to Already Running or Move to Idle, as per requirement. The corresponding success message will be received.

Figure 6
If Run is selected the request will be initiated successfully.
Figure 7
If you select already running the following success message will be displayed.

Figure 8
If you select Move to Idle, the following success message will be displayed.

Figure 9
Running
If one selects Running robots, the pertaining information will be displayed accordingly. And one can stop the run of robots.
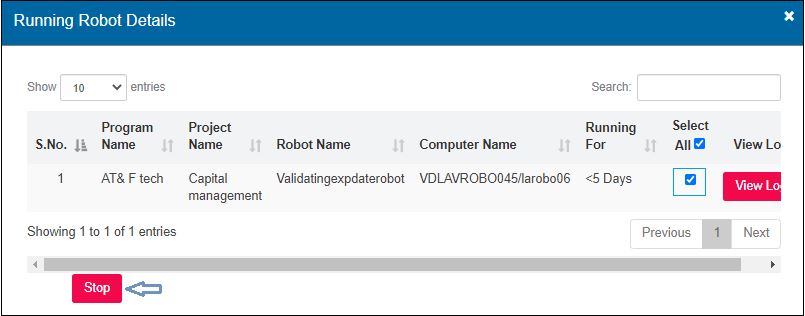
Figure 10
Not Responding
Not Responding Status- If the heartbeat from SmartRunner is not received by the SmartManager for more than five minutes, the machine will be moved to " Machine Not Responding" state. (Applicable for the updated version of SmartRunner 5.3.1.4)
So, select Not Responding robots, check the adjacent box under select header and move it to idle.
Note: Corresponding success messages will be displayed after each action has been successfully completed.
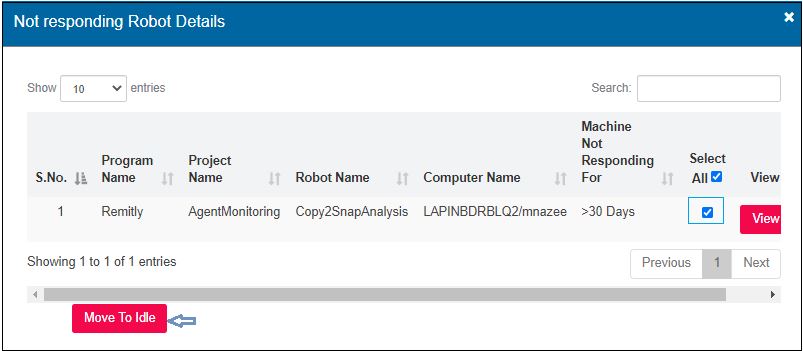
Figure 11
Note: Corresponding success messages will be displayed after each action has been successfully completed.
There are various log levels that are set for Smartworkflow or SmartDesigner, SmartRunner and SmartLogon.
SmartRunner log levels are set for monitoring the running in various runner instances such as single user run, or multiple user run in the same machine. Likewise logs can be set for SmartWorkflow and Logon. Here, The log details are shown for the past two hours.one can choose the number of hours from the drop-down to view the log level details accordingly.
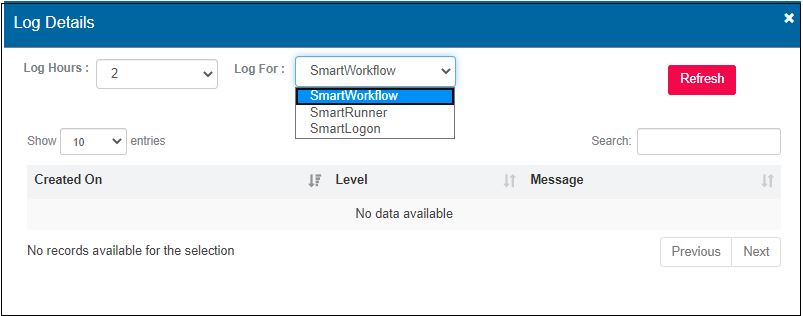
Figure 12
Info
This log level provides information pertaining to the start and end of the execution of the workflow, errors if any, warnings and fatal errors, will be captured if the user selects the info log level.
Trace
Trace level allows the user to capture every single action or step executed by the robot, along with the step by step information. Info, Debug and the succeeding levels are traced when one chooses the trace level.
Debug
If the requirement is for the initiation and completion details of the activities, barring the system information, choose the Debug level. Information, Warning and the subsequent levels will be captured (if present) when one chooses the Debug level. Except for trace all other log levels will be displayed.
Warning
The Warning level can be set in instances where the exception does not act as a barrier for processing but needs to be repaired. Just as in the aforementioned log levels, the warning will also capture the following levels, such as Error and fatal.
Error
In certain runs, some part of the workflow will be executed, and some others may not, due to errors and in such instances the user could set Error to check where and how the mistake has occurred.
Fatal
The execution of the robot that can be interrupted due to factors such as the prime inputs being invalid is of high importance and therefore will be tracked under the fatal option.
Off
You can turn off the log levels if you do not require them.
How to view logs

Figure 13
Thus, View Log option is used to view the log details, such as the log level that has been set and the subsequent messages.

Figure 14
With the Log level set as INFO, the output will also contain Error level information, which is displayed accordingly as shown in the following image.

Figure 15